19. Inverse Kinematics Example
Inverse Kinematics Example
To give you more insight into the solution process, particularly for the first three joint variables, we present an example of an RRP manipulator.
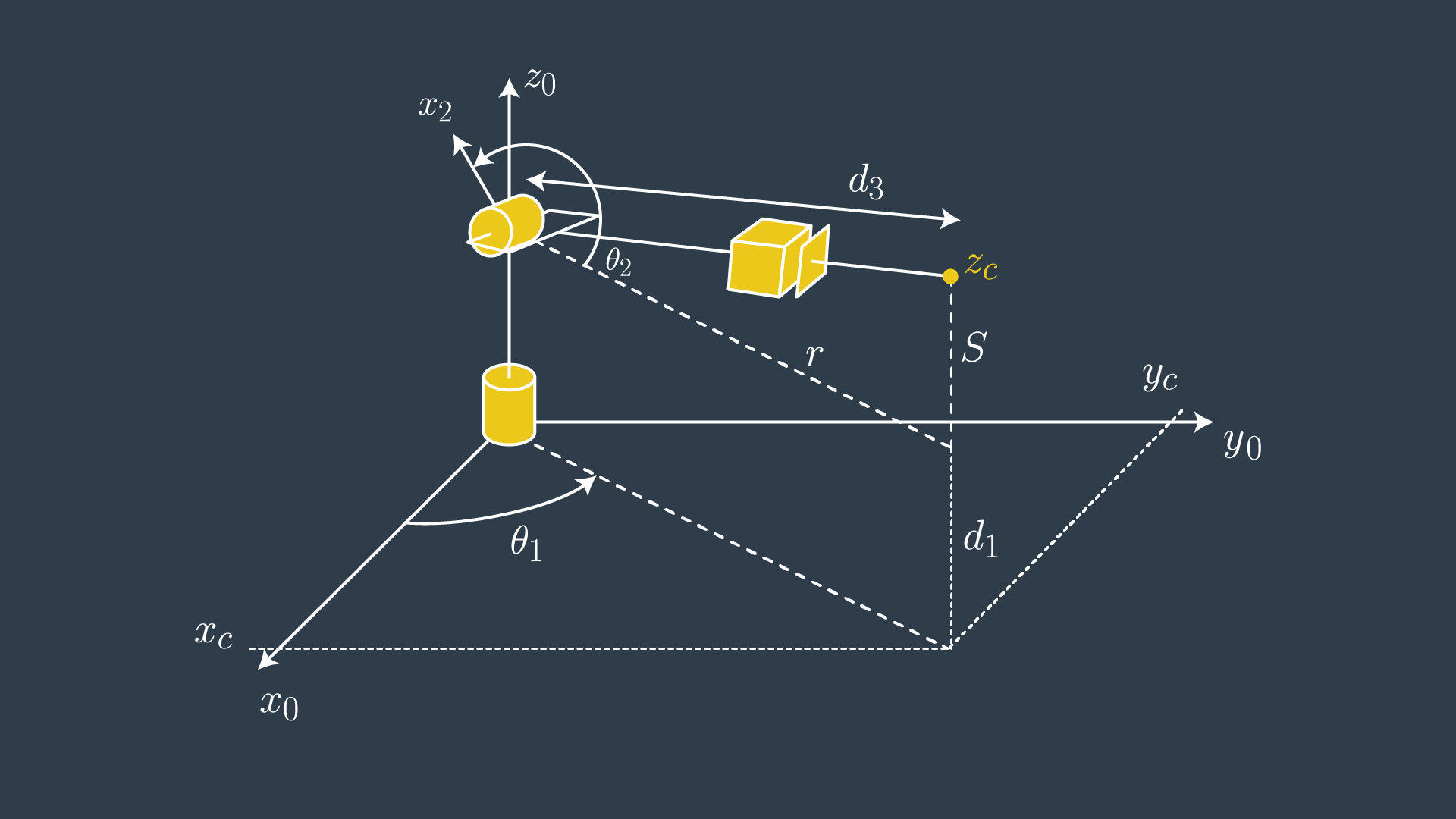
The point zc could be considered to be the wrist center of a spherical wrist. We will assume that the Cartesian coordinates of zc have already been calculated. To find 𝜃1, we need to project zc onto the ground plane - a trivial task since it only requires setting the z-coordinate = 0! Thus,
To solve for 𝜃2, imagine 𝜃1 = 0 and project links 2 and 3 onto the the x-z plane. Again, we use the atan2 function,
where,
and,
The final joint variable, d3, represents the length of the prismatic joint. From the figure, it is clear that d3 ,is the hypotenuse of a right triangle with sides “r” and “s”. Solving for d3,
And that’s it! The first three joint variables are now described explicitly in closed-form.